Lab 1 Arduino & Robot Square One
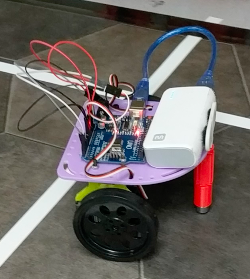
In this lab our group became more acquanted with Arduino and built the first phase of our robot.
In this lab our group became more acquanted with Arduino and built the first phase of our robot.
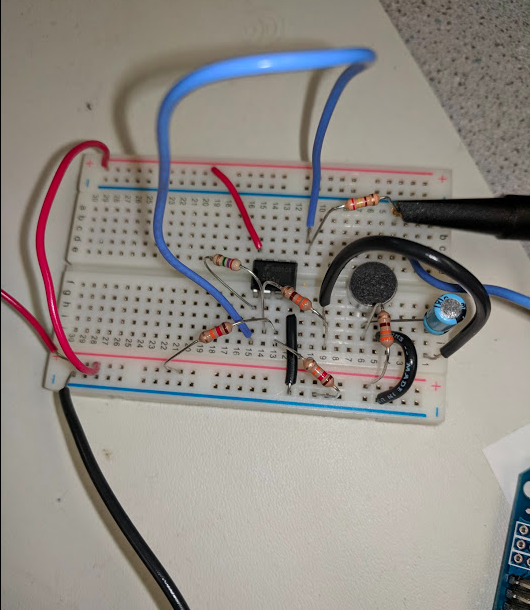
In this lab, our group employed digital filtering, analog filtering, and the FFT to create a means to detect both the signal to start the maze tracing, and other robots also tracing the maze.
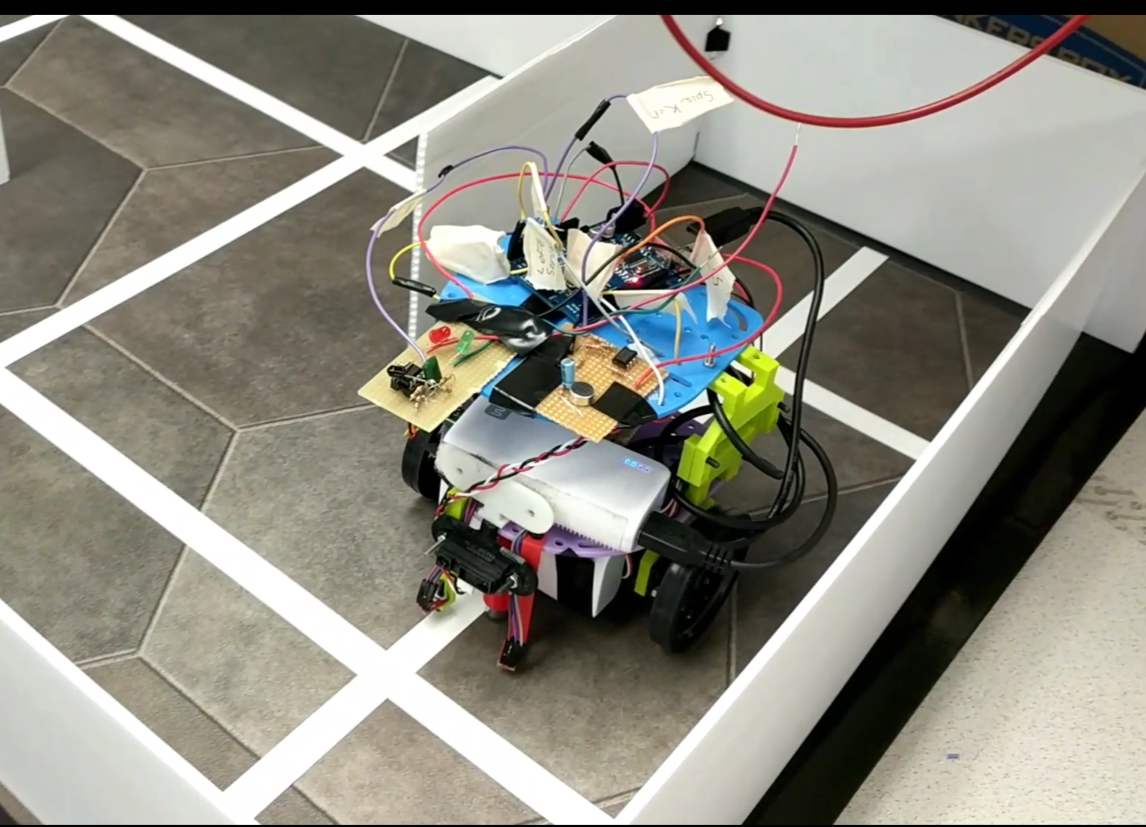
In this lab, our group was tasked with first integrating all aspects of previous creation: line following, robot detection, 660 Hz tone start, and wall following. Then, the new challenge was to collect information about the maze exploration effort had to be recorded and sent back to a wireless base station.

In this lab, our group employed an FPGA to detect the color and shape of the treasures hidden in the maze and then send those signals back to the Arduino to relay as maze information.